
Introduction
We’ve said goodbye to the 2024 Paris Olympics and the next one won’t be held until 4 years from now, but Google DeepMind’s development may mark the beginning of a new era in the development of sports and robotics. I recently came across a fascinating research paper (Achieving Human-Level Competitive Robot Table Tennis) by Google DeepMind that explores the capabilities of robots in table tennis. The study highlights how the advanced robot can play against human opponents of various skill levels and styles; the robot features 6-DoF ABB 1100 arms mounted on linear gantries and achieves an impressive 45% win rate. It’s amazing to think how far robotics has come!
It is only a matter of time before we witness a Robotics Olympics, where nations compete using their most advanced robotic athletes. Imagine robots competing in track and field events or facing off in competitive sports, showcasing the best of artificial intelligence in athletics.
Imagine this: you are watching a robot, with the precision and agility of an experienced player, skillfully playing table tennis against a human opponent. What would be your reaction? This article will discuss a groundbreaking achievement in robotics: the creation of a robot that can compete at an amateur level in table tennis. This is a major step towards achieving human-like robotic performance.
Overview
- Google DeepMind's table tennis robot can play at an amateur human level, marking a significant step in real-world robotic applications.
- The robot uses a hierarchical system to adapt and compete in real time, displaying advanced decision-making skills in sport.
- Despite its impressive 45% win rate against human players, the bot struggled with advanced strategies, revealing limitations.
- The project bridges the gap between simulation and reality, allowing the robot to apply learned simulation skills to real-world scenarios without the need for additional training.
- Human players found playing against the robot fun and engaging, emphasizing the importance of successful human-robot interaction.
Ambition: from simulation to reality
Barney J. Reed, professional table tennis coach, said:
It was really amazing to see the robot take on players of all levels and styles. Our initial goal was for the robot to be of an intermediate level. Amazingly, it achieved this; all the hard work paid off.
I feel like the robot exceeded even my expectations. It was a real honor and pleasure to be part of this research. I have learned a lot and I am very grateful to all the people I had the pleasure of working with on this.
<figure class="wp-block-embed is-type-rich is-provider-twitter wp-block-embed-twitter“>
The idea of a robot playing table tennis is not just about winning a match, but is a benchmark for evaluating the performance of robots in real-world situations. Table tennis, with its fast pace, need for precise movements, and strategic depth, presents an ideal challenge to test robotic capabilities. The ultimate goal is to bridge the gap between simulated environments, where robots are trained, and the unpredictable nature of the real world.
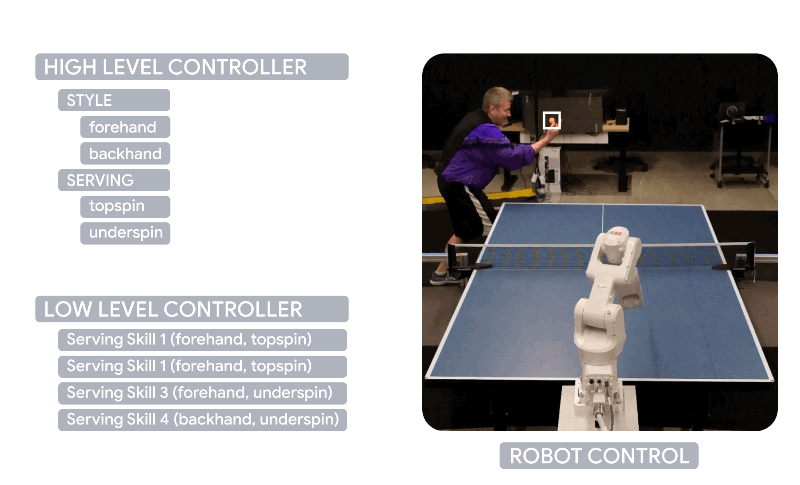
This project stands out for employing a novel modular and hierarchical policy architecture. It is a system that does more than just react to immediate situations and dynamically understands and adapts. Low-level controllers (LLCs) are responsible for specific skills (such as a forehand topspin or a backhand return), while high-level controllers (HLCs) orchestrate these skills based on real-time feedback.
The complexity of this approach cannot be overstated. It’s one thing to program a robot to hit a ball; it’s another to have it understand the context of a game, anticipate the opponent’s moves, and adapt its strategy accordingly. HLC’s ability to choose the most effective skill based on the opponent’s capabilities is where this system really shines, demonstrating a level of adaptability that brings robots closer to human-like decision-making.
Read also: Beginner's Guide to Robotics with Python
Breaking Down Zero-Shot's Simulation-to-Reality Challenge
One of the most challenging challenges in robotics is the gap between the real and the simulated—the difference between training in a simulated, controlled environment and performing in the chaotic real world. The researchers behind this project tackled this question head-on with innovative techniques that allow the robot to apply its skills in real-world matches without the need for additional training. This “zero-shot” transfer is particularly impressive and is achieved through an iterative process in which the robot continually learns from its real-world interactions.
What is striking here is the combination of reinforcement learning (RL) in simulation with real-world data collection. This hybrid approach allows the robot to progressively hone its skills, leading to increasingly better performance based on hands-on experience. It is a significant shift from more traditional robotics, where extensive real-world training is often required to achieve even basic competence.
Read also: Robotics and automation from a machine learning perspective
Performance: How well did the robot actually perform?
In terms of performance, the bot’s capabilities were tested against 29 human players of varying skill levels. The results? A respectable 45% win rate overall, with particularly strong results against beginner and intermediate players. The bot won 100% of its matches against beginners and 55% against intermediate players. However, it struggled against advanced and expert players, failing to win any matches.
These results are revealing. They suggest that while the robot has achieved solid performance at the amateur level, there is still a significant gap to compete with highly skilled human players. The robot's inability to handle advanced strategies, particularly those involving complex spins such as underspin, highlights the current limitations of the system.
Read also: Reinforcement Learning Guide: From Basics to Implementation
User Experience: Beyond Winning

Interestingly, the robot's performance was not limited to winning or losing. The human players who participated in the study reported that playing against the robot was fun and entertaining, regardless of the outcome of the match. This points to an important aspect of robotics that is often overlooked: the interaction between humans and robots.
Positive user feedback suggests that the robot's design is on the right track in terms of technical performance and creating a pleasant and challenging experience for humans. Even advanced players, who might exploit certain weaknesses in the robot's strategy, expressed satisfaction and saw potential in the robot as a practice partner.
This human-centered approach is crucial. After all, the ultimate goal of robotics is not just to create machines that can outperform humans, but to build systems that can work alongside us, enhance our experiences, and integrate seamlessly into our daily lives.
You can watch the full videos here: Click here.
You can also read the full research article here: Achieving human-level competitive robotic table tennis.
Critical analysis: strengths, weaknesses and the way forward
While the achievements of this project are undeniably impressive, it is important to critically analyze its strengths and shortcomings. The hierarchical control system and no-shot simulation-to-reality techniques represent significant advances in the field and provide a solid foundation for future developments. The robot’s ability to adapt in real time to unseen opponents is particularly noteworthy, bringing a level of unpredictability and flexibility crucial to real-world applications.
However, the robot’s difficulty with advanced players indicates the limitations of the current system. The problem with handling backlash is a clear example that more work is needed. This weakness is not just a minor flaw, it is a fundamental challenge that highlights the complexities of simulating human skills in robots. Addressing it will require further innovations, possibly in backlash detection, real-time decision making, and more advanced learning algorithms.
Read also: Top 6 Humanoid Robots in 2024
Conclusion
This project It represents a major milestone in robotics, as it demonstrates how far we have come in developing systems that can operate in complex, real-world environments. The robot’s ability to play table tennis at an amateur human level is a major achievement, but it also serves as a reminder of the challenges that still lie ahead.
As the research community continues to push the boundaries of what robots can do, projects like this will serve as critical benchmarks. They highlight both the potential and limitations of current technologies, offering valuable insight into the path forward. The future of robotics is bright, but it’s clear that there’s still much to learn, discover, and refine as we strive to build machines that can truly match — and perhaps one day surpass — human abilities.
Let me know what you think about robotics in 2024…
Frequently Asked Questions
Answer: It is a robot developed by Google DeepMind that can play table tennis at an amateur human level, showcasing advanced robotics in real-world scenarios.
Answer: It uses a hierarchical system, with high-level controllers deciding strategy and low-level controllers executing specific skills, such as different types of shots.
Answer: The robot struggled against advanced players, particularly in handling complex strategies such as underspin.
Answer: The challenge is to apply the skills learned in simulation to real-world games. The robot overcame this by combining the simulation with real-world data.
Answer: Regardless of the outcome of the match, players found the robot fun and engaging, highlighting the successful interaction between humans and robots.
<script async src="//platform.twitter.com/widgets.js” charset=”utf-8″>





{kind=link}