 NEWSLETTER
NEWSLETTER
Human-Robot collaboration focuses on the development of intelligent systems that work together with humans in dynamic environments. Researchers aim to build robots capable of understanding and executing natural language instructions while adapting to restrictions such as spatial positioning, task sequencing and capacity exchange between humans and machines. This field significantly advances robotics for domestic assistance, medical care and industrial automation, where efficiency and adaptability are crucial for perfect integration.
An important challenge in human-robot collaboration is the lack of a comprehensive reference point to evaluate planning and reasoning skills in tasks of multiple agents. While the previous models have addressed the navigation interactions and unique agent, they cannot capture complexities of the real world where robots must coordinate with humans. Many existing approaches do not take into account real -time tasks, the adaptation of the partners and the effective recovery of errors. The absence of an established standard makes it difficult to evaluate and improve the performance of the collaborative ai systematically interactive environments.
The current approaches in the incarnate AF are often focused on the execution of a single agent tasks, without taking into account the need for coordination in scenarios of multiple agents. Some methods are based on instructions of planted tasks, limiting the scalability and diversity of tasks, while others depend on the evaluation functions manually prepared, which makes large -scale evaluations not very practical. Despite the advances, the latest generation language models (LLM) fight with the monitoring of tasks, coordination and recovery of execution failures. These limitations hinder their ability to function efficiently in environments focused on the human being where adaptability and precise execution of tasks are essential.
Fair Meta researchers have introduced Partnr (planning and reasoning tasks in the collaboration of Human-Robot), a large-scale reference point designed to evaluate the coordination of human robot in simulated environments. Partnr includes 100,000 natural language tasks, covering 60 simulated houses and 5,819 unique objects. The reference point specifically evaluates tasks that incorporate spatial, temporal and heterogeneous restrictions. The researchers secured a realistic and scalable task generation process by taking advantage of a semi -automatized pipe that integrates LLM and the simulation validation in the loop. Partnr aims to establish a standard to evaluate the ability to collaborate with human partners effectively.
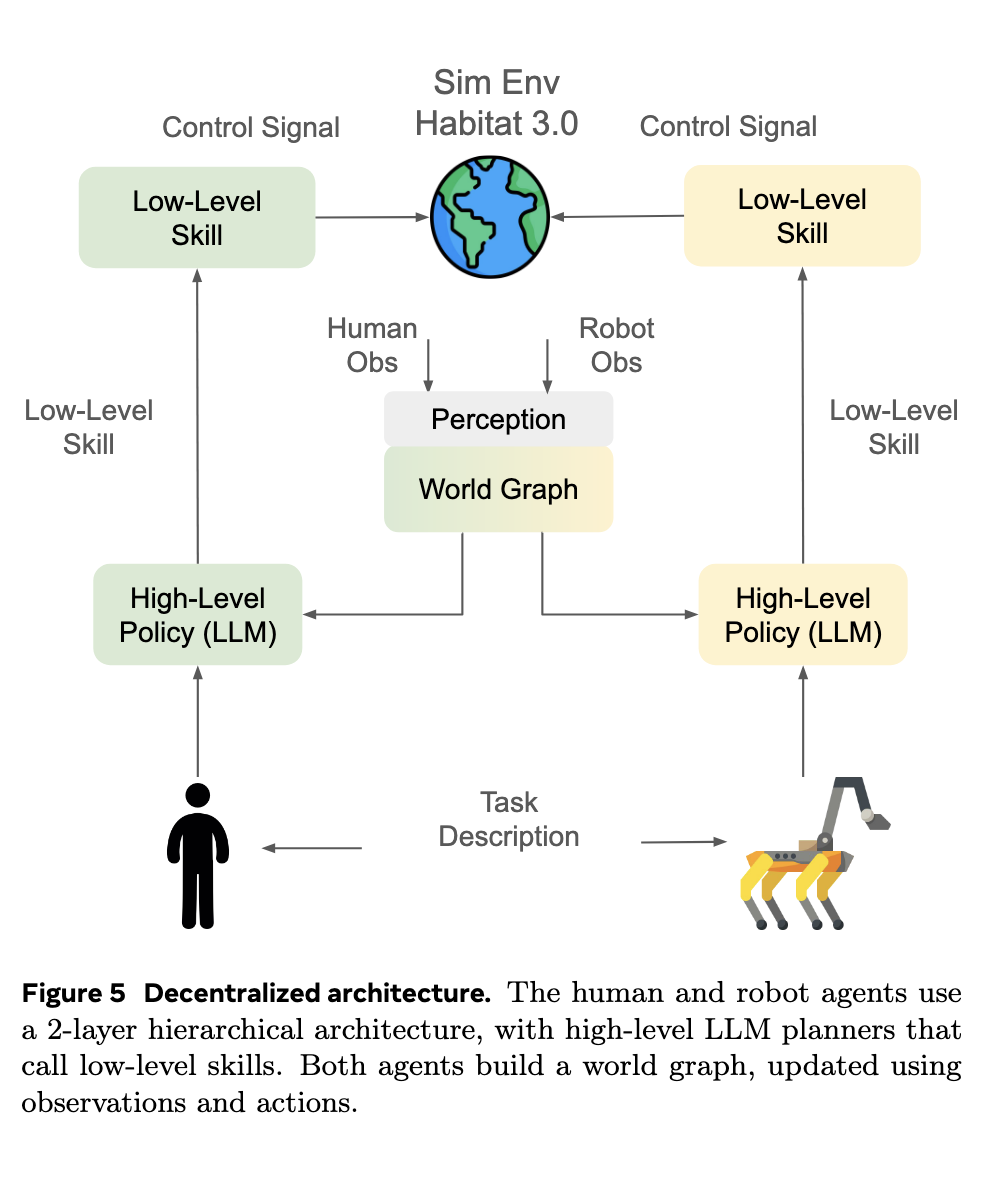
The researchers generated instructions for tasks and evaluation functions using LLM to create the reference point. Then they leaked through simulation to eliminate unfeasible tasks. The final data set underwent human validation in the loop to improve the diversity of tasks and guarantee precision. Partn tasks are divided into four categories: free of restrictions, spatial, temporal and heterogeneous. Without restriction tasks allow flexibility in the execution order, while space tasks require specific object positioning. Temporary tasks require ordered execution, and heterogeneous tasks imply actions beyond the ability of the robot, which require human intervention. These task structures introduce challenges in coordination, monitoring and precision of execution.
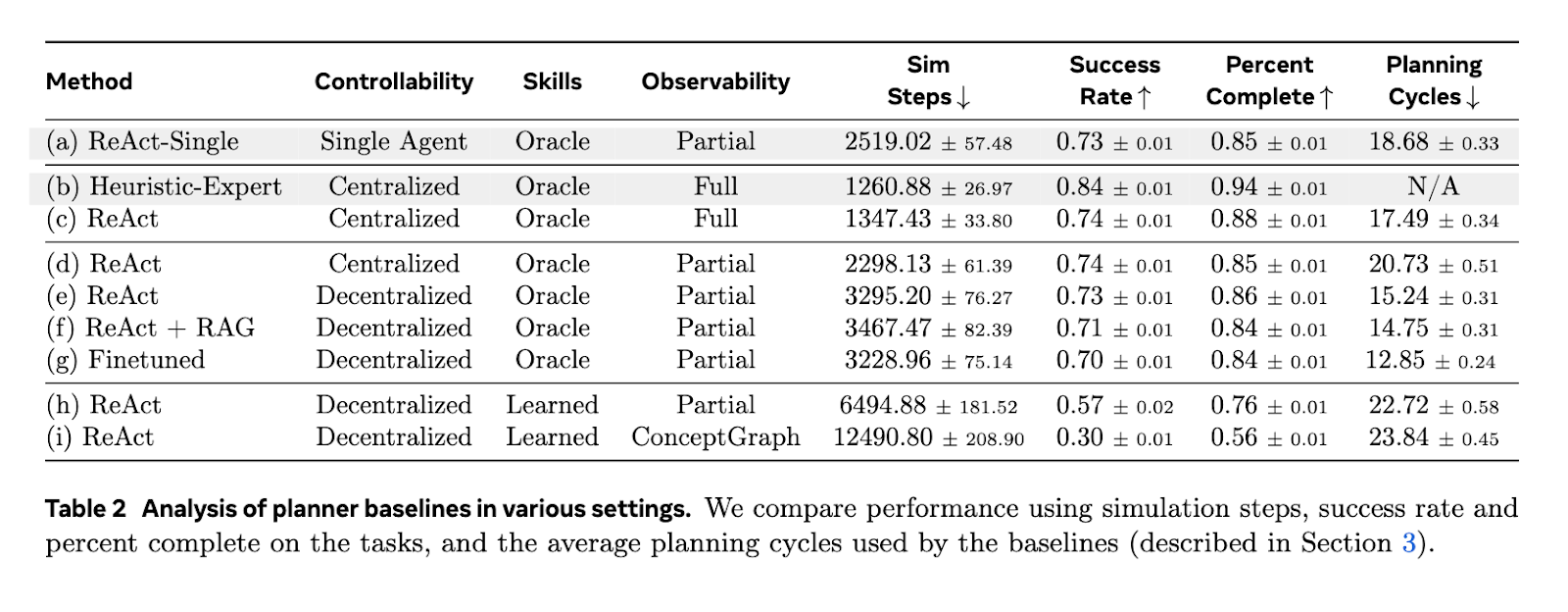
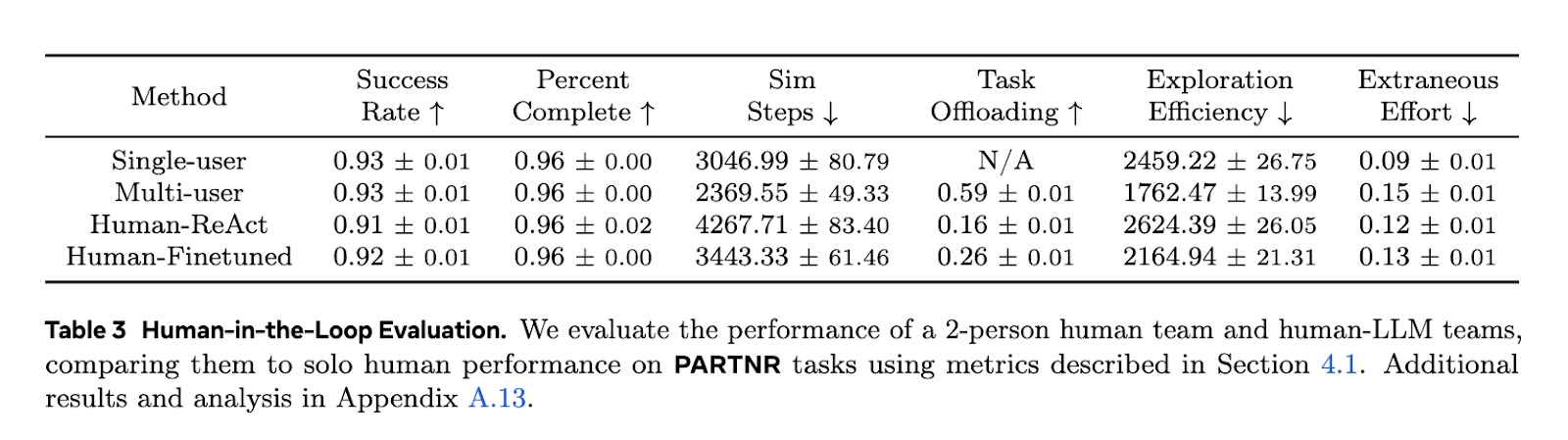
The evaluations of the LLM -based planning agents in Partnr revealed significant limitations in coordination, the monitoring of the tasks and the recovery of errors. When combined with humans, Robots guided by LLM required 1.5 times more steps than human teams and 1.1 times more steps than a single human to complete tasks. The success rate of the avant -garde LLM was only 30% in non -privileged conditions, compared to 93% when the tasks were performed only by humans. In addition, the smallest LLMS adjustment reached the yield comparable to nine larger models, while they are 8.6 times faster to inference. In the decentralized configuration of multiple agents, the completion of the task required 1.3 times more steps than a single agent scenario, which demonstrates inefficiencies in the current coordination mechanisms.
Partnr highlights the crucial gaps in the existing human-robot collaboration models promoted by ai, emphasizing better planning, monitoring and decision-making strategies. The findings indicate that despite the advances in ai, the human collaboration-robot points require substantial improvements to close the disparity of performance between ai and humans. The structured evaluation framework offered by Partnr provides a way to advance the ability to collaborate, plan and execute tasks efficiently. Future research should focus on refining LLM -based planners, improve coordination mechanisms and improve perception models to address current limitations in the interaction of multiple agents. Partnr is a valuable resource to boost innovation in incorporated collaborative systems.
Verify he <a target="_blank" href="https://ai.meta.com/research/publications/partnr-a-benchmark-for-planning-and-reasoning-in-embodied-multi-agent-tasks/” target=”_blank” rel=”noreferrer noopener”>Paper. All credit for this investigation goes to the researchers of this project. Besides, don't forget to follow us <a target="_blank" href="https://x.com/intent/follow?screen_name=marktechpost” target=”_blank” rel=”noreferrer noopener”>twitter and join our Telegram channel and LINKEDIN GRsplash. Do not forget to join our 75K+ ml of submen.
Recommended open source ai platform: 'Intellagent is a framework of multiple open source agents to evaluate the conversational the complex system' (Promoted)
Nikhil is an internal consultant at Marktechpost. He is looking for a double degree integrated into materials at the Indian Institute of technology, Kharagpur. Nikhil is an ai/ML enthusiast who is always investigating applications in fields such as biomaterials and biomedical sciences. With a solid experience in material science, it is exploring new advances and creating opportunities to contribute.






{kind=link}